Iteration
A couple days ago I wrote that I was almost done with the hard part of the slide scanner.
Well, nope.
Too many stacking tolerances combined with trying to over-constrain how the slide can move. Add in some issues with the timing of the mechanism and you have a fail.
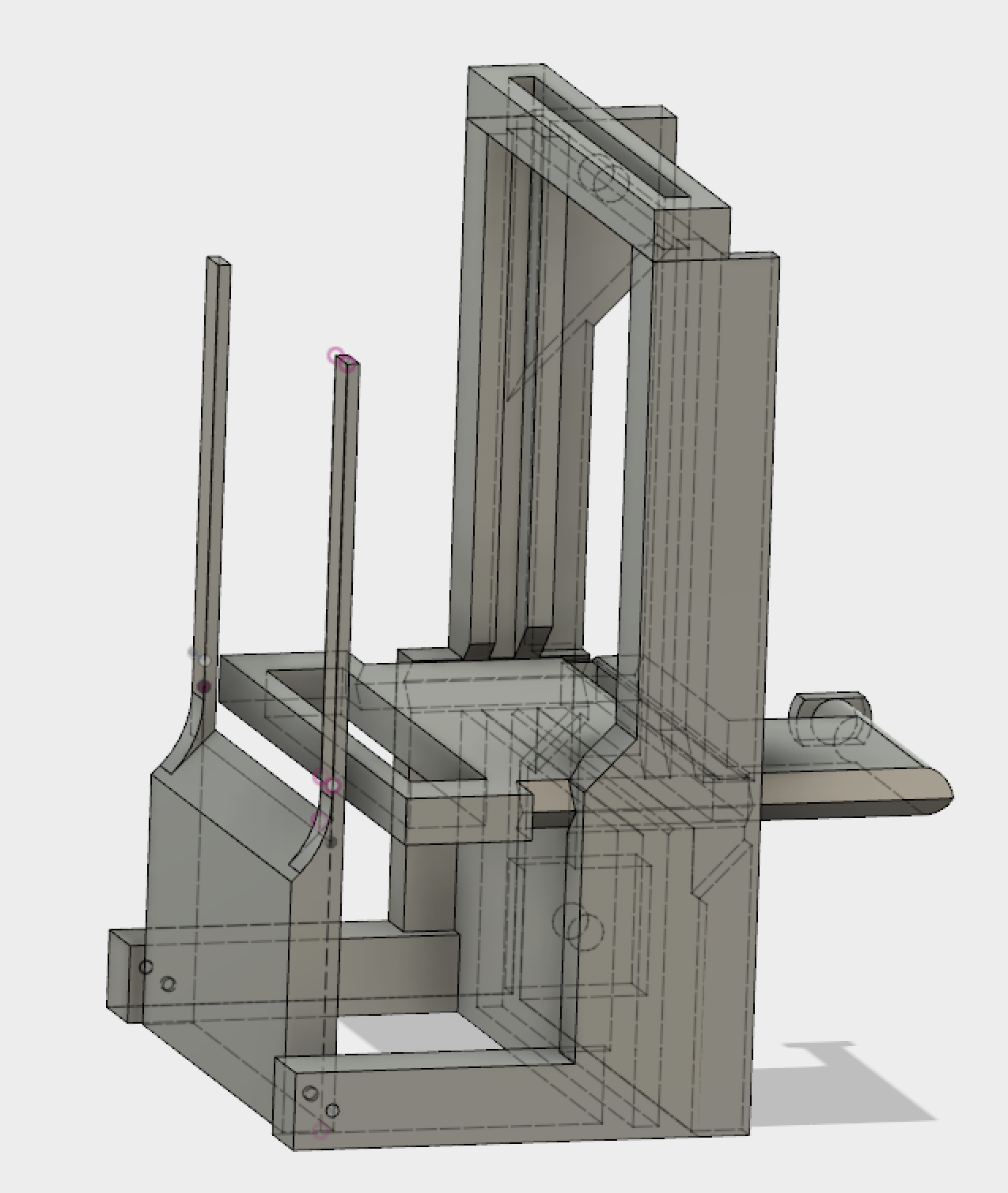
So, here's the latest version. This has the slide which positively controls the tensioning arms (imagine the arms going through the hole) and solving the timing problem of letting off tension when you're trying to accept or eject a slide
.I may need to tweak this a bit further in terms of how flexy the arms should be, but this time I'm pretty confident.